# 3. \[로봇 데이터 불러오기] 사용 방법
## 0. \[로봇 데이터 불러오기] 기능 소개
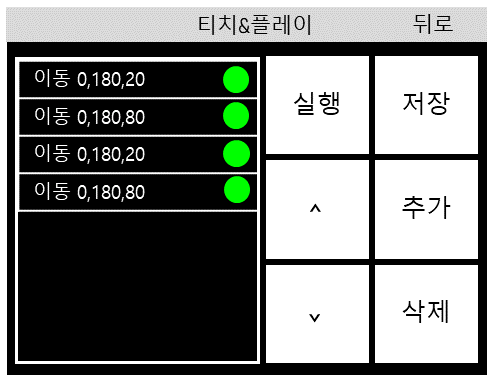
HUENIT OS에서 \[로봇 조작] > \[티치&플레이] 기능에서 로봇팔의 움직임 만든 다음, HUENIT OS에 저장할 수 있습니다. ( → [**(클릭)\[티치&플레이\] 저장 방법 알아보기!**](https://huenit.gitbook.io/huenit-edu/huenit/1./1.3-and#id-3.-and))
기존에 저장된 \[티치&플레이] 정보를 불러올 수 있는 메뉴입니다.
{% hint style="info" %}
단, 자동 저장된 \[티치&플레이] 정보는 \[로봇 데이터 불러오기]에 저장되지 않습니다.
{% endhint %}
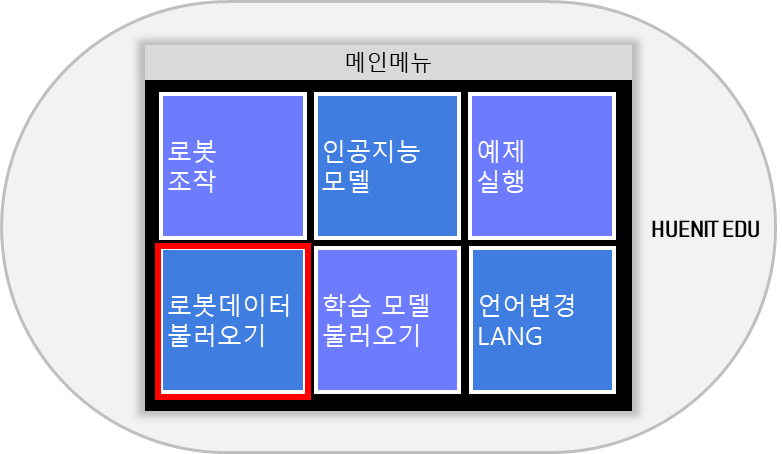
[로봇 데이터 불러오기]
## 1. \[로봇 데이터 불러오기] 사용 방법
(1) HUENIT 로봇팔과 HUENIT OS를 연결해줍니다.
{% hint style="warning" %}
HUENIT OS와 로봇팔이 연결되지 않으면 \[티치&플레이] 기능을 사용할 수 없습니다.
{% endhint %}
(참고1)[AI 카메라를 로봇팔의 C-type 시리얼 포트에 연결하는 방법](https://huenit.gitbook.io/huenit-edu/huenit/1.#id-1-3-1-huenit-serial)
(참고2)[AI 카메라를 로봇팔에 카메라 거치대를 이용하여 연결하는 방법 ](https://huenit.gitbook.io/huenit-edu/huenit/1.#id-1-3-2-huenit-ai)
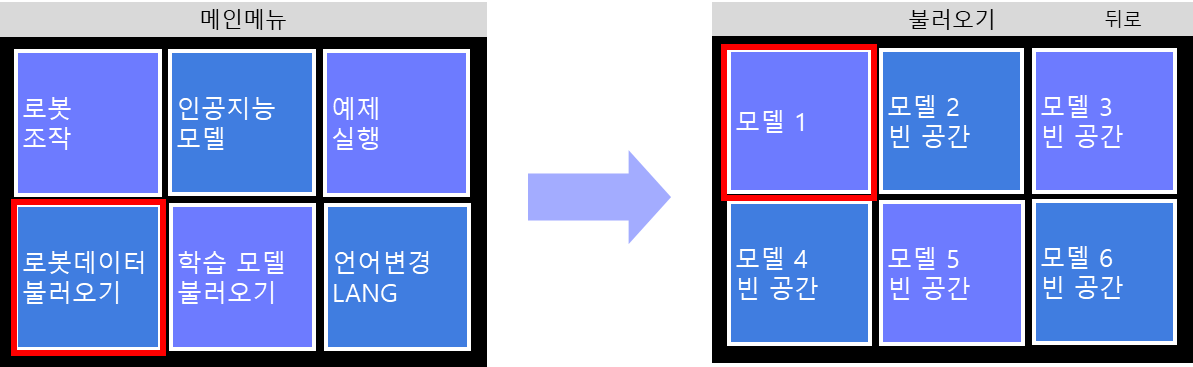
(2) HUENIT OS의 메인 화면에서 \[로봇 데이터 불러오기]를 클릭한 후, 불러오고 싶은 항목을 선택합니다.
(3) 저장된 \[티치&플레이] 정보가 정상적으로 불러와지면, 데이터가 성공적으로 로드된 것입니다.