# 1. \[로봇 조작] 사용 방법
## HUENIT OS - 로봇조작 메뉴
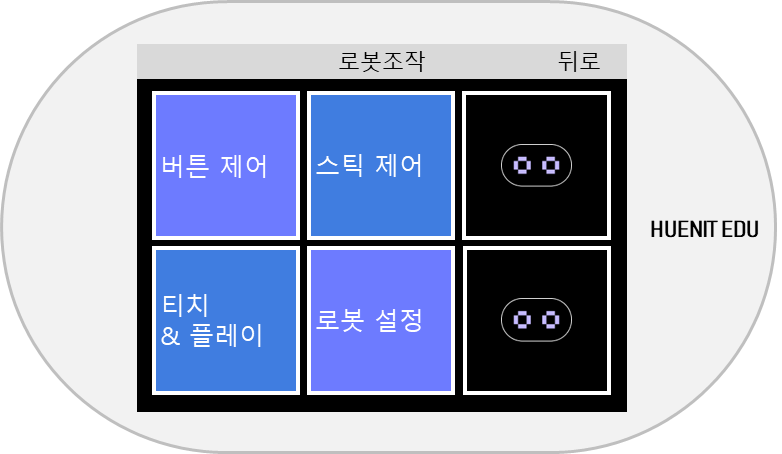
HUENIT OS의 초기화면에서 **\[로봇 조작]** 메뉴에 진입하면 다음과 같이 총 4개의 버튼이 있습니다:
1. [버튼 제어](https://huenit.gitbook.io/huenit-edu/huenit/huenit-os/1./1.1)
2. [스틱 제어](https://huenit.gitbook.io/huenit-edu/huenit/huenit-os/1./1.2)
3. [티치 & 플레이](https://huenit.gitbook.io/huenit-edu/huenit/huenit-os/1./1.3-and)
4. 로봇 설정
[로봇 조작] 메뉴 진입
## 1. 준비하기
### 1-1 준비물
{% hint style="warning" %}
**참고**: 반드시 USB 3.1 이상 지원하는 C to C 케이블을 사용해야 합니다.
{% endhint %}
### 1-2 로봇 전원 연결하기
{% hint style="warning" %}
### 로봇팔 전원 연결 시 주의사항
AI카메라가 로봇팔에 연결되어 있는 상태에서 로봇팔의 DC IN에 전원을 연결할 경우, AI 카메라에 과전류가 흘러 로봇팔에 제대로 전원이 연결되지 않을 수 있습니다.
{% endhint %}
로봇 후면에 있는 포트 중 'DC IN'이라고 적힌 포트가 전원 케이블을 연결하는 포트입니다. 해당 포트에 전원 케이블을 연결하여 로봇에 전원이 들어오는지 확인합니다.
[HUENIT 로봇팔 후면] - DC IN 포트
전원 케이블을 연결하여 로봇의 전원이 켜지면, HUENIT 로봇팔이 초기 위치(x=0, y=180, z=0)로 이동합니다. 전원이 켜진 후에는 각 모터가 작동 중이므로, 로봇팔을 손으로 강제로 움직이면 기기에 손상이 발생할 수 있습니다.
[HUENIT 로봇팔 후면] - 전원 케이블 연결
### 1-3 HUENIT 로봇팔과 AI 카메라 연결하기
AI 카메라를 로봇팔에 연결하는 방법은 두 가지가 있습니다:
1. AI 카메라 자치대를 활용하여 연결하는 방법
2. HUENIT 로봇팔 후면의 Serial 포트를 이용하여 연결하는 방법
이 중에서 HUENIT OS로 로봇팔을 제어하기 위해서는 두 번째 방법으로 AI 카메라를 로봇팔에 연결해야 합니다.
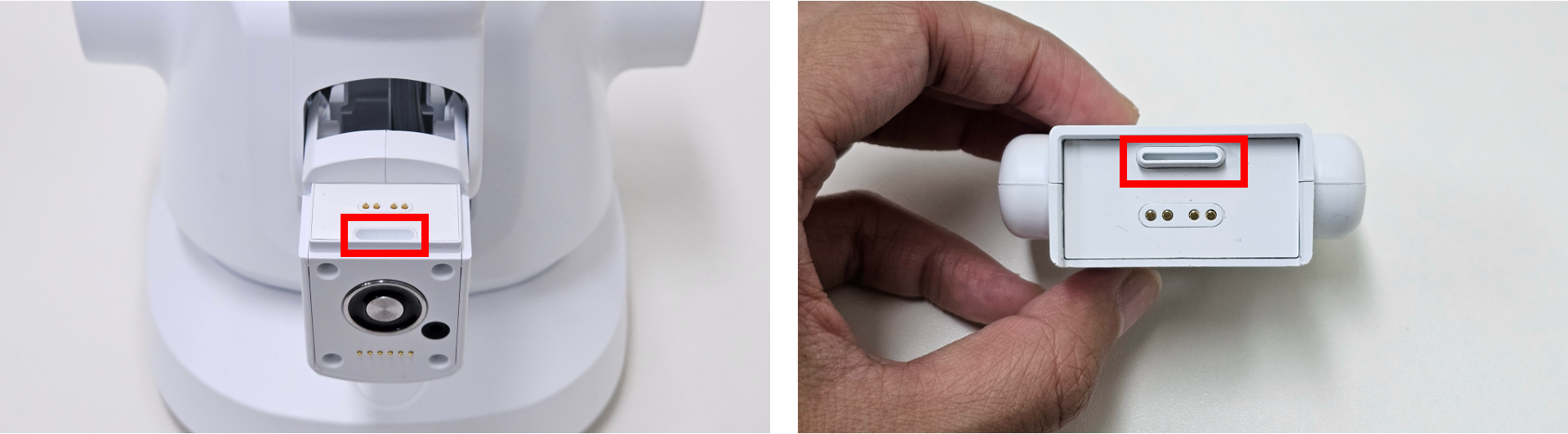
#### **1-3-1 HUENIT 로봇팔 후면의 Serial 포트를 이용하여 연결하는 방법**
* 로봇팔의 후면에는 C 타입 포트가 두 개 있는데, 그 중 'Serial'이라고 적힌 C 타입 포트에 카메라를 연결해야 합니다.
* 카메라를 연결한 후 HUENIT OS 초기 화면이 표시되면 준비가 완료된 것입니다. :tada:
#### 1-3-2 **HUENIT 로봇팔에 카메라 거치대로 AI 카메라 연결하는 방법**
* AI 카메라 거치대를 HUENIT AI 카메라의 C타입 단자에 연결합니다.
* AI 카메라 거치대와 HUENIT 로봇팔을 홈에 맞춰 자석으로 연결합니다. (주의사항 : 자석으로 연결할 때 손이 끼지 않도록 주의합니다.)
* 다음과 같이 연결되면 성공입니다.
로봇에 전원이 켜진 상태에서 AI 카메라를 연결하면, AI 카메라의 LED에 눈 모양 애니메이션이 나타납니다. 이 애니메이션이 표시되면 AI 카메라가 로봇팔에 제대로 연결이 된 것입니다.
{% hint style="info" %}
AI 카메라에 불이 들어오지 않을 경우, AI 카메라 거치대의 금속핀과 로봇팔의 금속핀이 제대로 연결되지 않은 것입니다.
{% endhint %}