# (예제2) 석션모듈로 물체 이동
## :round\_pushpin:좌표 확인하기
석션 모듈을 활용한 물체 이동에는 **시작 위치(픽업 지점)**와 **도착 위치(배치 지점)**의 좌표가 필요합니다.
해당 좌표는 다음의 방법으로 확인할 수 있습니다:
* **\[컨트롤]** 탭에서 직접 위치를 조절하여 확인
* 또는 **HUENIT OS의 \[티치&플레이]** 기능을 활용하여 저장
{% hint style="info" %}
아래 그림에 표시된 물체의 위치와 높이는 참고용입니다.\
실제 작업 환경에 따라 좌표를 조정하여 사용하세요.
{% endhint %}
✅ 예시에서 사용될 좌표
시작 위치(픽업 지점) - X : -160, Y: 245, Z : -35
도착 위치(배치 지점) - X : 120, Y : 250, Z : -35
***
## 🧭 로봇팔 이동 경로 구성하기
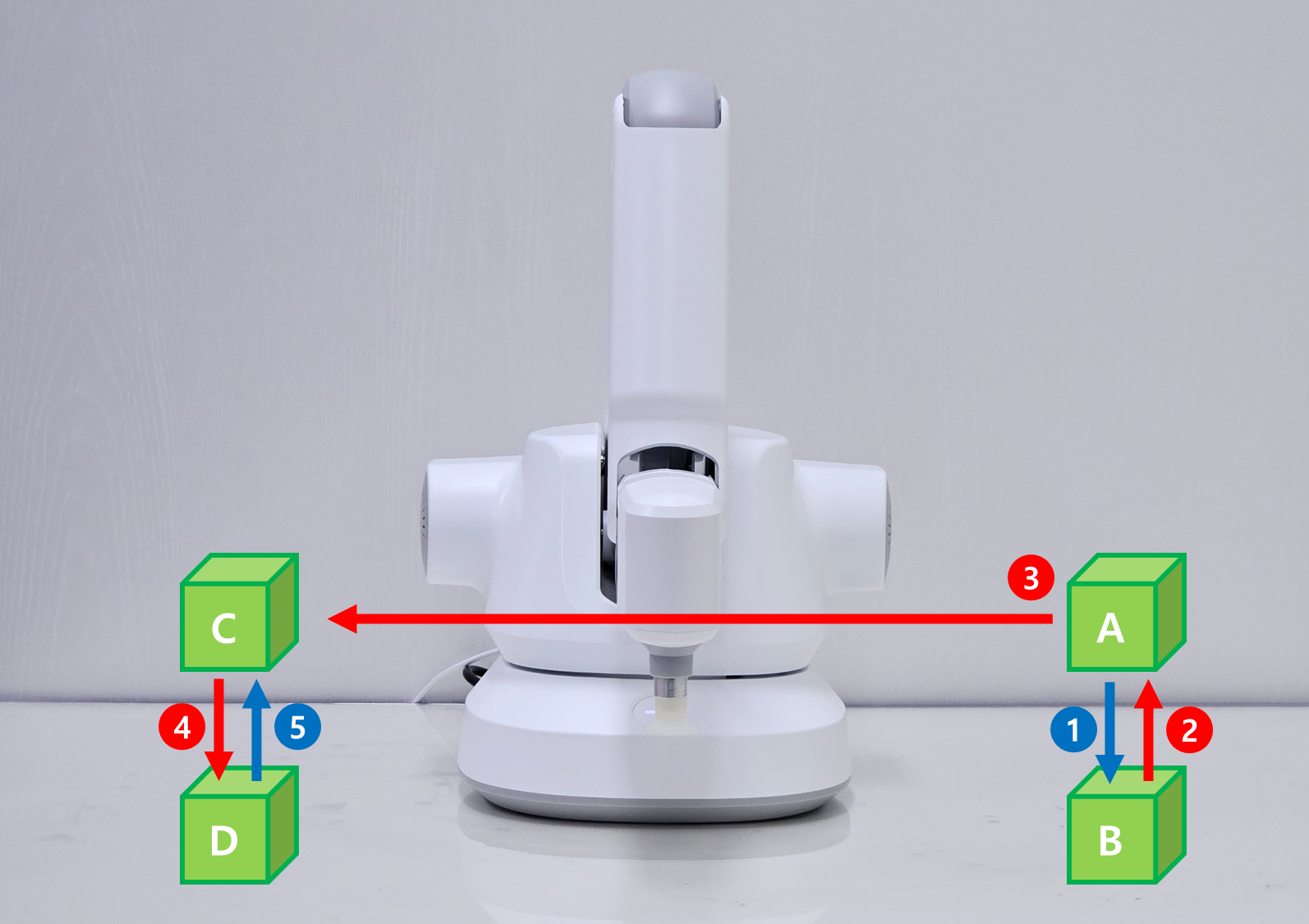
1. 이동경로 : A ➞ B ➞ A ➞ C ➞ D ➞ C
2. 모듈 동작 추가 : A ➞ B ➞ **석션 켜기** ➞ A ➞ C ➞ D ➞ **석션 끄기** ➞ C
3. 지연시간 추가 : A ➞ B ➞ 석션 켜기 ➞ **1초 쉬기** ➞ A ➞ C ➞ D ➞ 석션 끄기 ➞ **1초 쉬기** ➞ C
{% hint style="info" %}
각 모듈이 동작할 때, **석션은 약 1\~2초**, **그리퍼는 약 2\~3초** 정도의 지연 시간을 두면 정확한 동작 여부를 확인할 수 있습니다.
{% endhint %}
***
## :desktop:코딩하기
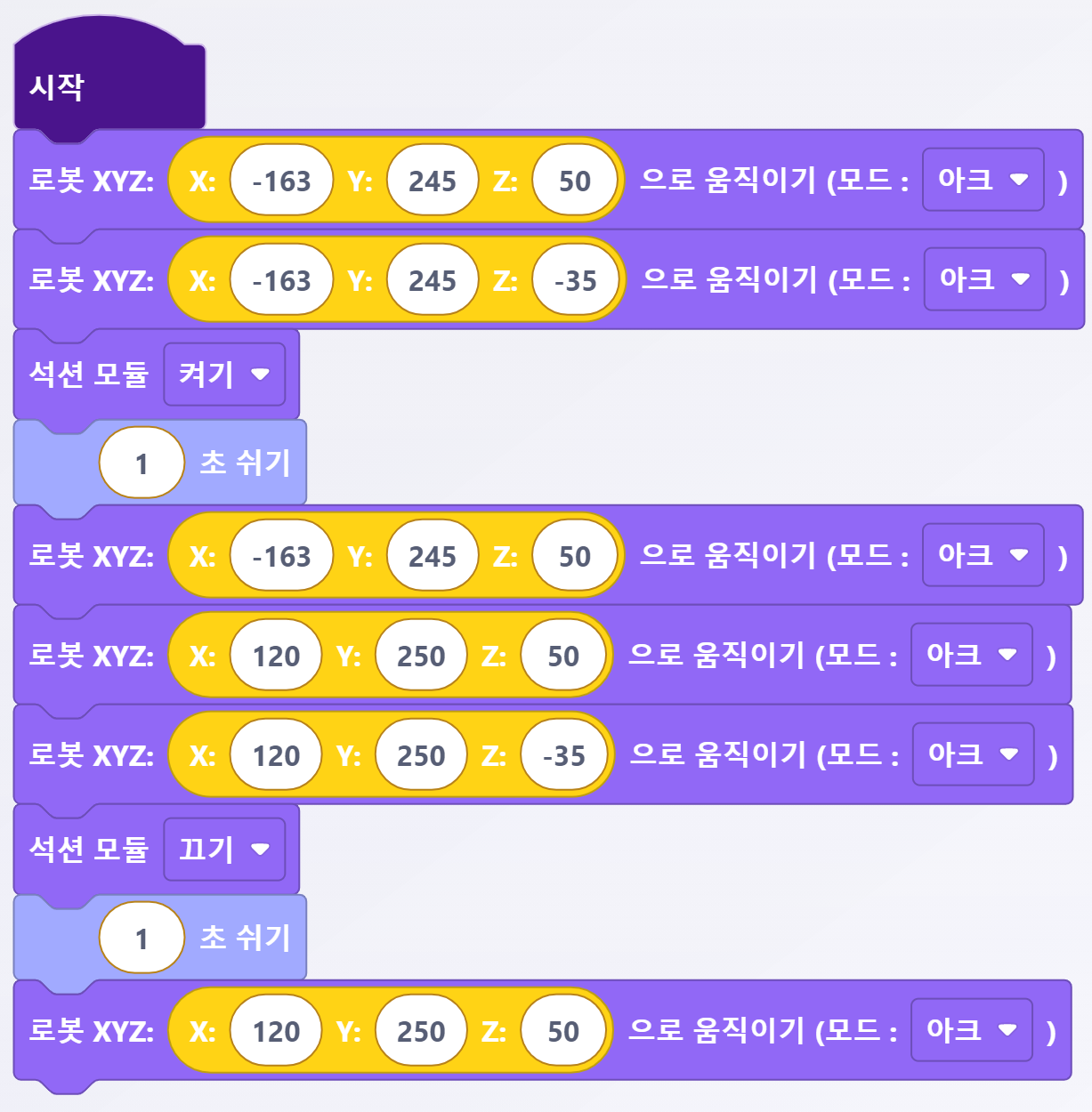
시작 위치와 도착 위치를 제외한, **물체를 들어올리는 Z 좌표는 기본값으로 50**을 사용하였으며, 필요에 따라 수정할 수 있습니다.\
또한, 물체를 집어 올릴 때와 내려놓을 때의 X, Y 좌표는 동일하게 설정하여 코드를 작성하였습니다.
{% hint style="info" %}
💡 이 코드는 \[라이브] 실행 시 1회만 동작하도록 구성되어 있으며, 반복 횟수나 동작 내용을 자유롭게 변경할 수 있습니다.
{% endhint %}
#### 🟢 기본 예시
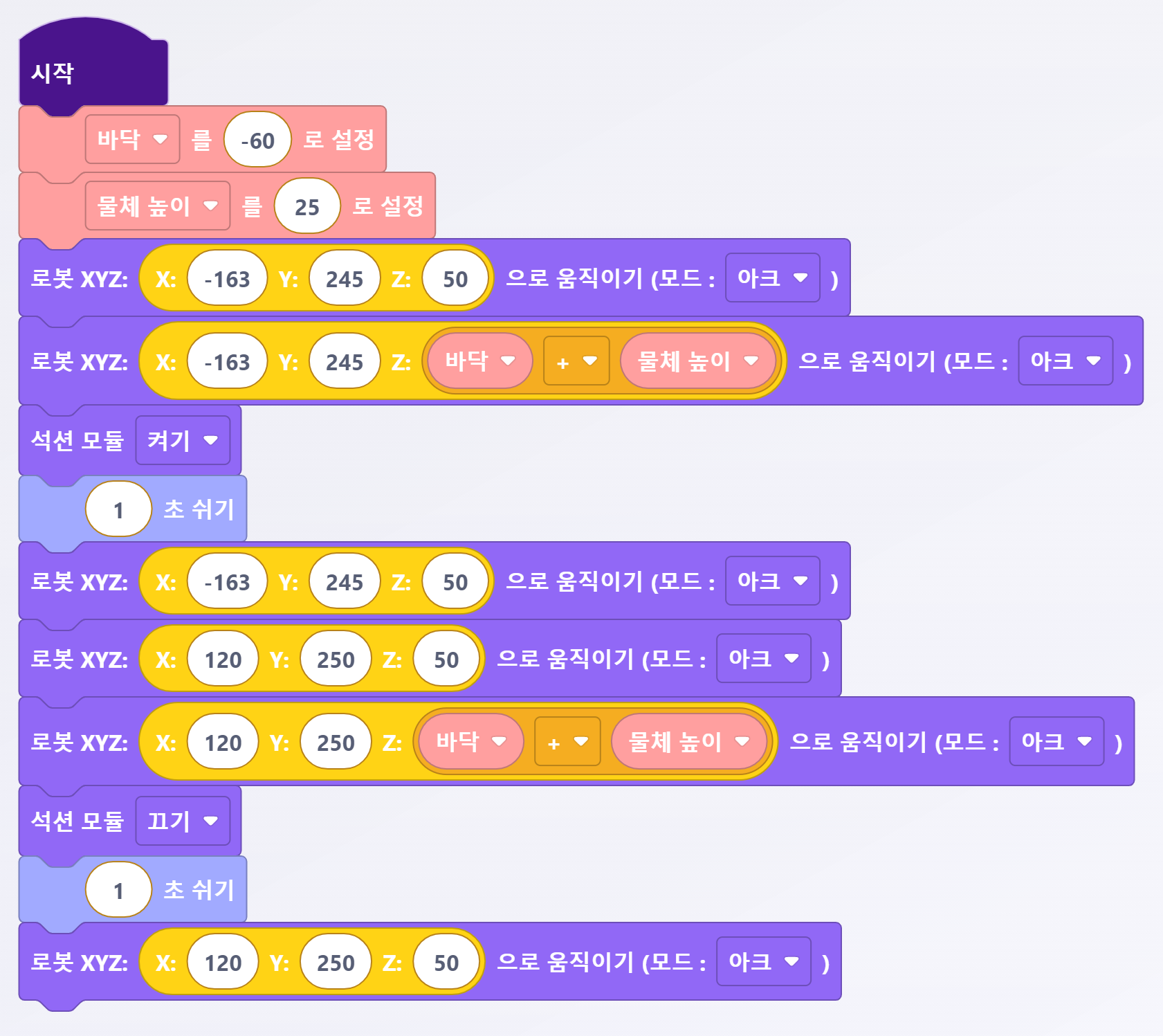
#### 🔢 변수 활용 예시
{% hint style="info" %}
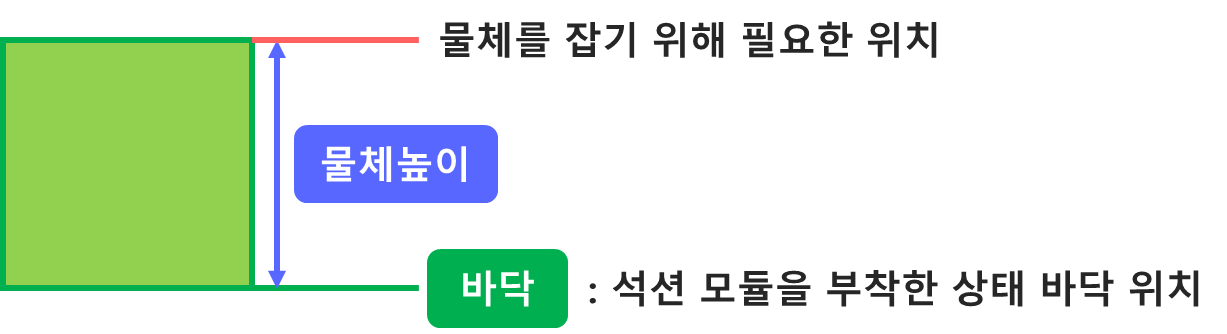
석션 모듈이 장착된 상태에서의 바닥 Z 좌표와 물체의 높이를 변수로 정의해두면,\
이 두 값을 기준으로 보다 쉽게 위치를 제어할 수 있습니다.
{% endhint %}
* 변수 설정
* 코드 예시
***
## :clapper:예시 영상
{% embed url="" %}

 시작 위치(픽업 지점) - X : -160, Y: 245, Z : -35
시작 위치(픽업 지점) - X : -160, Y: 245, Z : -35
 도착 위치(배치 지점) - X : 120, Y : 250, Z : -35
***
## 🧭 로봇팔 이동 경로 구성하기
1. 이동경로 : A ➞ B ➞ A ➞ C ➞ D ➞ C
2. 모듈 동작 추가 : A ➞ B ➞ **석션 켜기** ➞ A ➞ C ➞ D ➞ **석션 끄기** ➞ C
3. 지연시간 추가 : A ➞ B ➞ 석션 켜기 ➞ **1초 쉬기** ➞ A ➞ C ➞ D ➞ 석션 끄기 ➞ **1초 쉬기** ➞ C
{% hint style="info" %}
각 모듈이 동작할 때, **석션은 약 1\~2초**, **그리퍼는 약 2\~3초** 정도의 지연 시간을 두면 정확한 동작 여부를 확인할 수 있습니다.
{% endhint %}
도착 위치(배치 지점) - X : 120, Y : 250, Z : -35
***
## 🧭 로봇팔 이동 경로 구성하기
1. 이동경로 : A ➞ B ➞ A ➞ C ➞ D ➞ C
2. 모듈 동작 추가 : A ➞ B ➞ **석션 켜기** ➞ A ➞ C ➞ D ➞ **석션 끄기** ➞ C
3. 지연시간 추가 : A ➞ B ➞ 석션 켜기 ➞ **1초 쉬기** ➞ A ➞ C ➞ D ➞ 석션 끄기 ➞ **1초 쉬기** ➞ C
{% hint style="info" %}
각 모듈이 동작할 때, **석션은 약 1\~2초**, **그리퍼는 약 2\~3초** 정도의 지연 시간을 두면 정확한 동작 여부를 확인할 수 있습니다.
{% endhint %}