# 3.1 펜 높이 설정(Z축 교정)
## Z축 교정 팝업
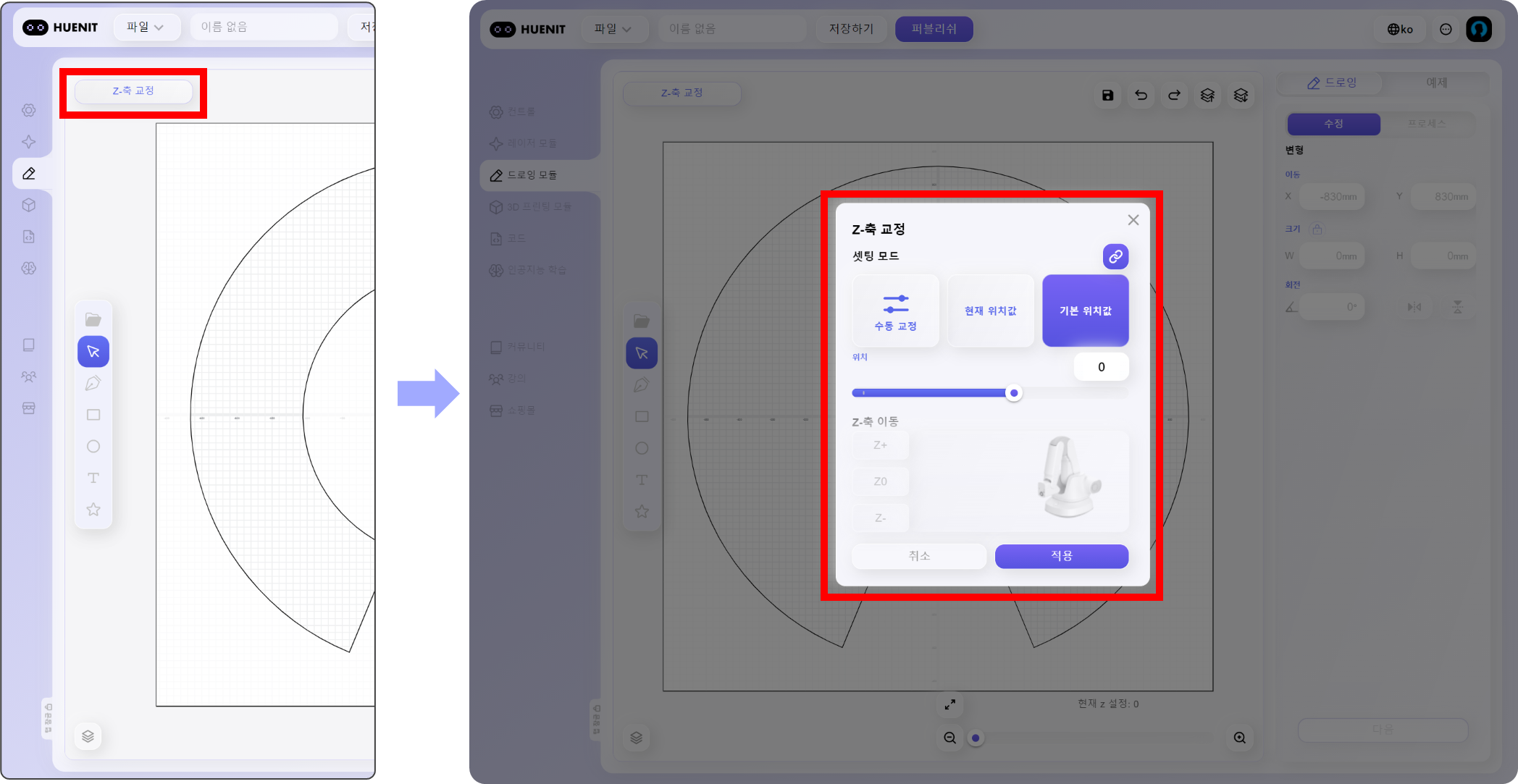
Z축 교정 팝업은 \[드로잉] 탭에 처음 진입할 때 자동으로 표시됩니다. 만약 팝업을 닫았다면, 드로잉 인터페이스의 좌측 상단에 있는 **\[Z축 교정] 버튼**을 눌러 다시 열 수 있습니다.
1. 최초 진입 시
2. \[Z축 교정] 버튼 클릭 시
## 펜 높이 설정 (Z축 교정)
펜 높이 설정은 드로잉의 품질을 결정하는 중요한 과정으로, 정확한 설정을 통해 정밀하고 깨끗한 작업이 가능합니다. HUENIT은 아래 세 가지 Z축 교정 옵션을 제공합니다:
> **세팅 모드**
1. **수동 교정**
* 사용자가 직접 펜의 높이를 조정하여 원하는 위치에 맞출 수 있습니다.
2. **현재 위치값 사용**
* 현재 로봇팔의 펜 위치를 기준으로 Z축 값을 설정합니다.
3. **기본 위치값 사용**
* 시스템에서 제공하는 초기 기본값을 Z축 높이로 설정합니다.
> **작업 영역 표시 기능**
설정한 펜 높이에 따라 로봇팔이 그릴 수 있는 작업 영역이 실시간으로 화면에 표시됩니다. 이를 통해 작업 영역을 정확히 확인하고 필요한 경우 재조정할 수 있습니다.
## 각각의 세팅 모드로 Z축 교정을 하는 방법
> 준비
* 펜 홀더 모듈에 펜을 꽂은 후, 제공된 나사를 이용해 단단히 고정해줍니다.
{% hint style="warning" %}
나사를 충분히 조이지 않으면 드로잉 중 펜이 흔들리거나 위로 밀려 올라가 그림이 제대로 그려지지 않을 수 있습니다. 안정적인 작업을 위해 반드시 단단히 고정해주세요.
{% endhint %}
* 펜 홀더 모듈을 로봇팔에 장착한 뒤, 펜촉이 닿을 부분에 종이를 깔아둡니다.
{% hint style="warning" %}
실제 드로잉에 사용할 종이와 동일한 두께의 종이를 깔아야 Z축 교정이 정확하게 이루어집니다. 작업 환경의 일관성을 유지하기 위해 이 과정을 꼭 확인하세요.
{% endhint %}
펜 홀더 모듈이 로봇팔에 장착된 모습
### 1. 수동 교정
{% hint style="warning" %}
HUENIT 로봇팔이 연결된 경우에만 수동 교정을 통해 Z축을 설정할 수 있습니다.
{% endhint %}
> #### **(STEP1)로봇팔 연결**
최초에 **\[수동 교정]** 버튼을 클릭하면, HUENIT 시스템이 자동으로 로봇팔과의 연결을 시도합니다.
연결이 실패한 경우, PC와 로봇팔의 연결 상태를 확인한 뒤, **\[연결🔗]** 버튼을 클릭하여 다시 연결을 시도합니다.
연결이 정상적으로 이루어지면 수동 교정을 진행할 수 있습니다.
> **(STEP2)Z축 이동**
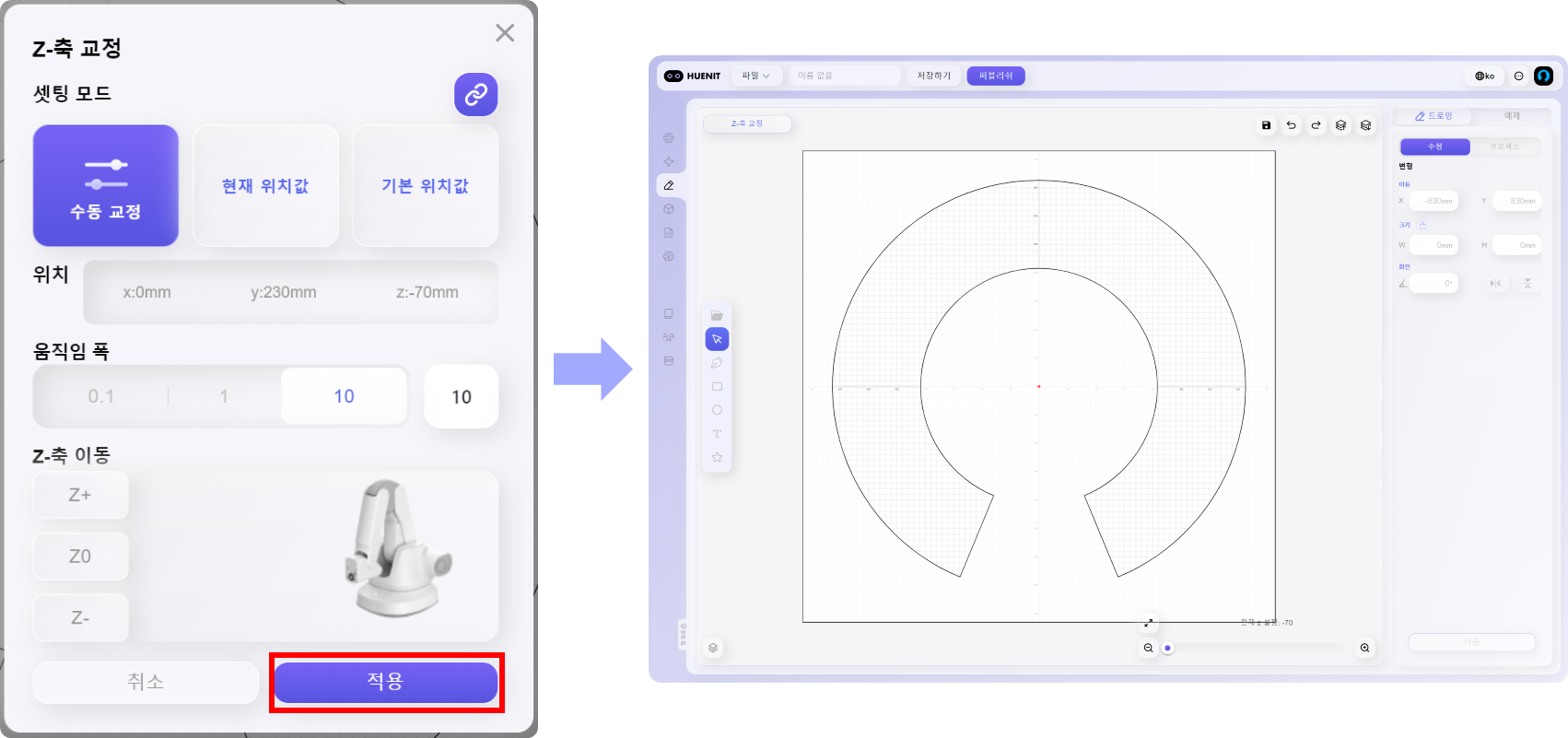
\[Z+], \[Z0], \[Z-] 버튼을 이용하여 펜 촉이 종이에 닿을 때까지 Z축을 천천히 내려줍니다.
> **(STEP3)적용 및 작업 공간 확인**
\[적용] 버튼을 눌러 Z축 교정을 완료하면, Z축 교정 값에 따라 작업 공간이 설정된 것을 확인할 수 있습니다.
> \[영상] (드로잉)Z축 교정 - 수동교정 방법법
{% embed url="" %}
### 2. 현재 위치 값
{% hint style="warning" %}
HUENIT 로봇팔이 연결된 경우에만 \[현재 위치 값]을 통해 Z축을 설정할 수 있습니다.
{% endhint %}
> \[컨트롤] 탭 - 자동연결
\[컨트롤] 탭에서 \[자동연결] 버튼을 눌러 로봇팔과 PC를 연결합니다.
> 모터 OFF 상태에서 원하는 위치로 이동
* <모터 ON>과 <모터 OFF>
로봇팔 버튼으로 모터를 **OFF 상태**로 전환한 뒤, **펜촉을 종이에 닿는 위치로 이동**시키고, 버튼을 다시 눌러 모터를 ON 상태로 변경합니다.
> 모터 OFF > 로봇팔 이동 > 모터 ON
> \[현재 위치 값] 선택 및 적용
\[드로잉] 탭에 진입하면 표시되는 Z축 교정 팝업에서 \[현재 위치값]을 클릭합니다. 방금 이동시킨 로봇팔의 위치가 현재 위치값으로 적용된 것을 확인할 수 있습니다.
\[적용] 버튼을 클릭하여 해당 값에 맞게 작업 공간이 설정된 것을 확인합니다.
> ### \*주의사항
\[자동연결**🔗**] 버튼을 누르면, 로봇팔이X:0, Y:200, Z:20 위치로 이동하게 되어, **현재 위치의 Z좌표로 Z축 교정을 진행할 수 없습니다.**
### 3. 기본 위치 값
{% hint style="info" %}
이전 작업에서 사용한 Z 값을 유지하고 싶을 때 적합한 세팅 모드입니다.
{% endhint %}
로봇팔이 연결과 상관없이 사용할 수 있는 세팅 모드 입니다.
> Z값 변경 방법
\[기본 위치값] 세팅 모드에서 Z 값은 다음 두 가지 방법으로 변경할 수 있습니다:
1. 직접 입력
2. 슬라이드 조절