# 1. \[컨트롤] 탭
### HUENIT LAB - \[컨트롤] 탭
**\[컨트롤]** 탭에서는 코딩없이 로봇팔을 제어할 수 있다. 현재 로봇팔의 위치(X, Y, Z좌표)도 확인하면서 제어할 수 있어 HUENIT OS보다 정확한 로봇 제어가 가능하다.
HUENIT LAB의 인터페이스를 보면서 **\[컨트롤]** 탭에는 어떤 기능이 있는지 살펴보자.
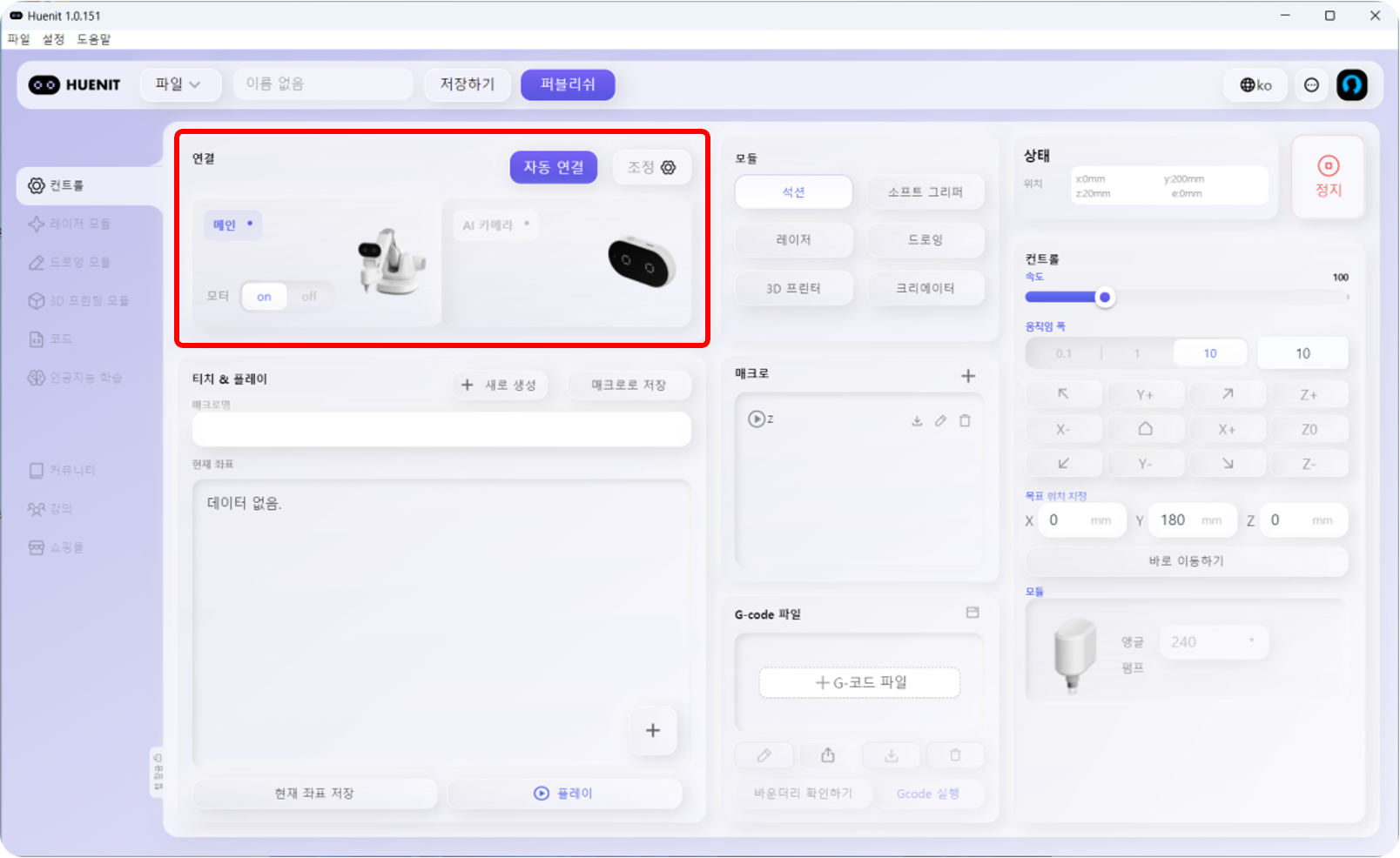
#### 1. 자동 연결 및 연결상태 확인
로봇팔을 제어하기 위해서는 HUENIT LAB에 로봇팔이 연결되어 있어야 한다. **자동연결 기능**을 통해 HUENIT 로봇팔 또는 AI 카메라를 연결할 수 있다. 또한, 현재 연결된 장치가 무엇인지도 확인 가능하다. (AI 카메라의 연결상태 및 자동연결 또한 \[컨트롤]탭에서 가능하지만, AI 카메라를 제어할 수 있는 기능은 없다.)
또한, 로봇팔의 모터의 상태를 확인할 수 있다. 기본적으로 로봇팔에 전원이 연결되면 모터에 힘이 들어가 ON(켜짐) 상태이고, 모터를 OFF(꺼짐) 상태로 바꾸면 모터에 힘이 빠져 원하는 위치로 로봇을 이동할 수 있다. 주로 \[티치 & 플레이]에서 많이 사용된다.
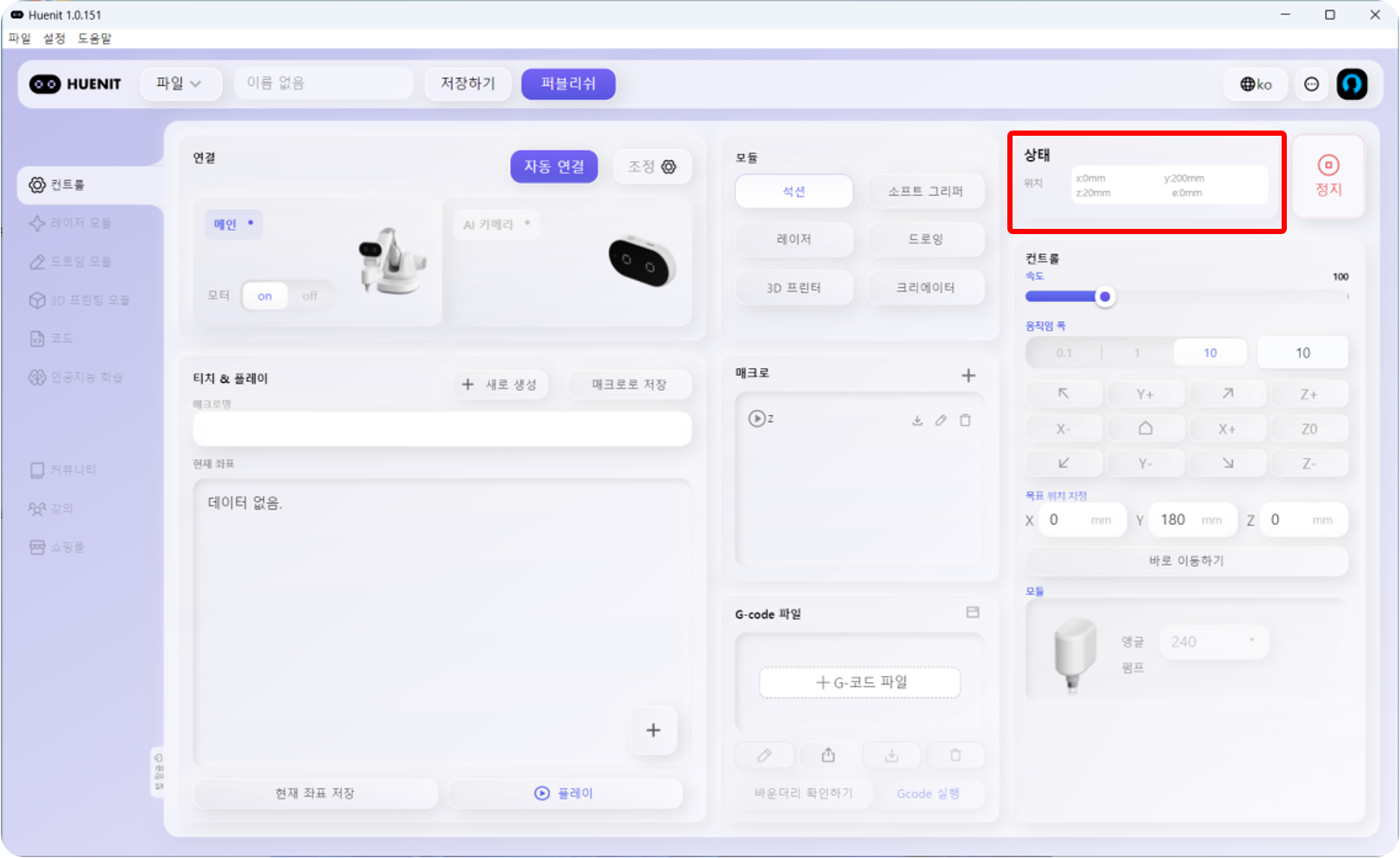
#### 2. 상태(Status)
**\[상태(Status)]**에서 현재 로봇팔의 위치(X, Y, Z좌표)를 알 수 있다.
#### 3. 컨트롤 패드
**\[컨트롤]**에서는 로봇팔의 움직임을 제어할 수 있다. 움직일 때의 속도, 폭 등을 조절하여 원하는 방향의 버튼을 클릭하여 로봇팔을 이동하거나, 원하는 위치의 좌표를 직접 입력하여 한 번에 이동시킬 수도 있다.
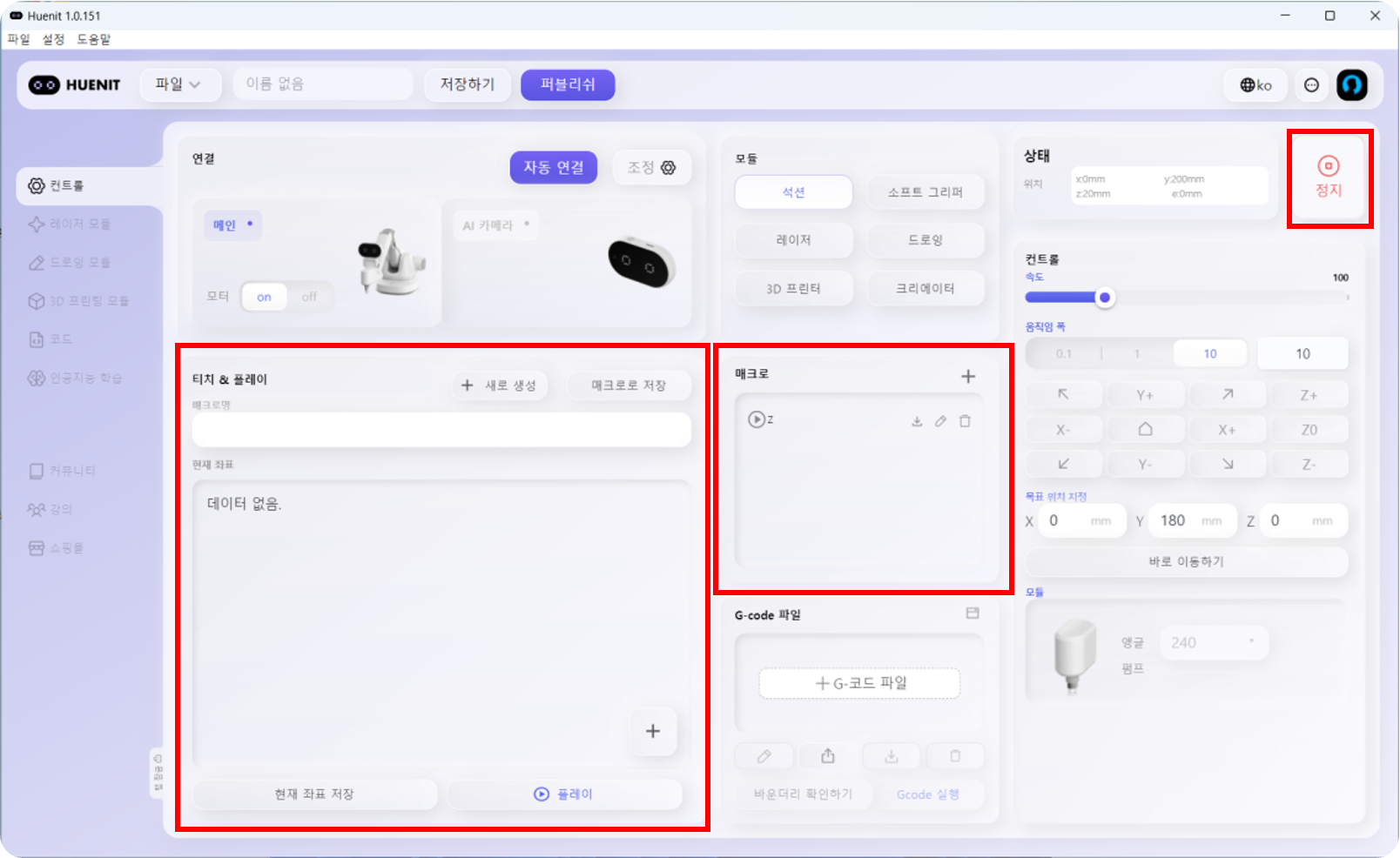
#### 3. 티치 & 플레이
**\[티치 & 플레이(Teach & Play)]**는 말 그대로 로봇팔을 가르치고(Teach) 실행시키는(Play) 기능이다. 내가 원하는 로봇팔의 움직임을 만드는 기능이라고 생각하면 된다.
그러기 위해서는 로봇팔이 움직임에 따라 X, Y, Z 좌표가 어떻게 변화하는지 먼저 이해하는것이 좋다. 로봇팔이 움직일 수 없는 형태로 좌표를 추가하게 되면 로봇팔이 실행할 수 없기 때문이다.
원하는 좌표로 이동하는 움직임 뿐만 아니라 로봇팔과 결합하여 사용할 수 있는 다양한 모듈의 움직임 또한 추가할 수 있다.
{% hint style="info" %}
\[티치 & 플레이] 기능에서 결합하여 사용할 수 있는 모듈은 석션과 소프트 그리퍼가 있다.
{% endhint %}
**\[매크로(Macro)]**에 **\[티치 & 플레이(Teach & Play)]**에서 만든 움직임을 저장할 수 있다. 뿐만 아니라, 이미 저장된 매크로를 바로 실행하거나 다운로드, 수정 및 삭제를 할 수 있다.
**\[정지(Stop)]** 주로 로봇팔의 움직임을 멈추고 싶을 때 사용한다. **\[티치 & 플레이(Teach & Play)]**에서 만든 움직임을 실행하는 도중에 멈추고 싶을 때 주로 사용한다.
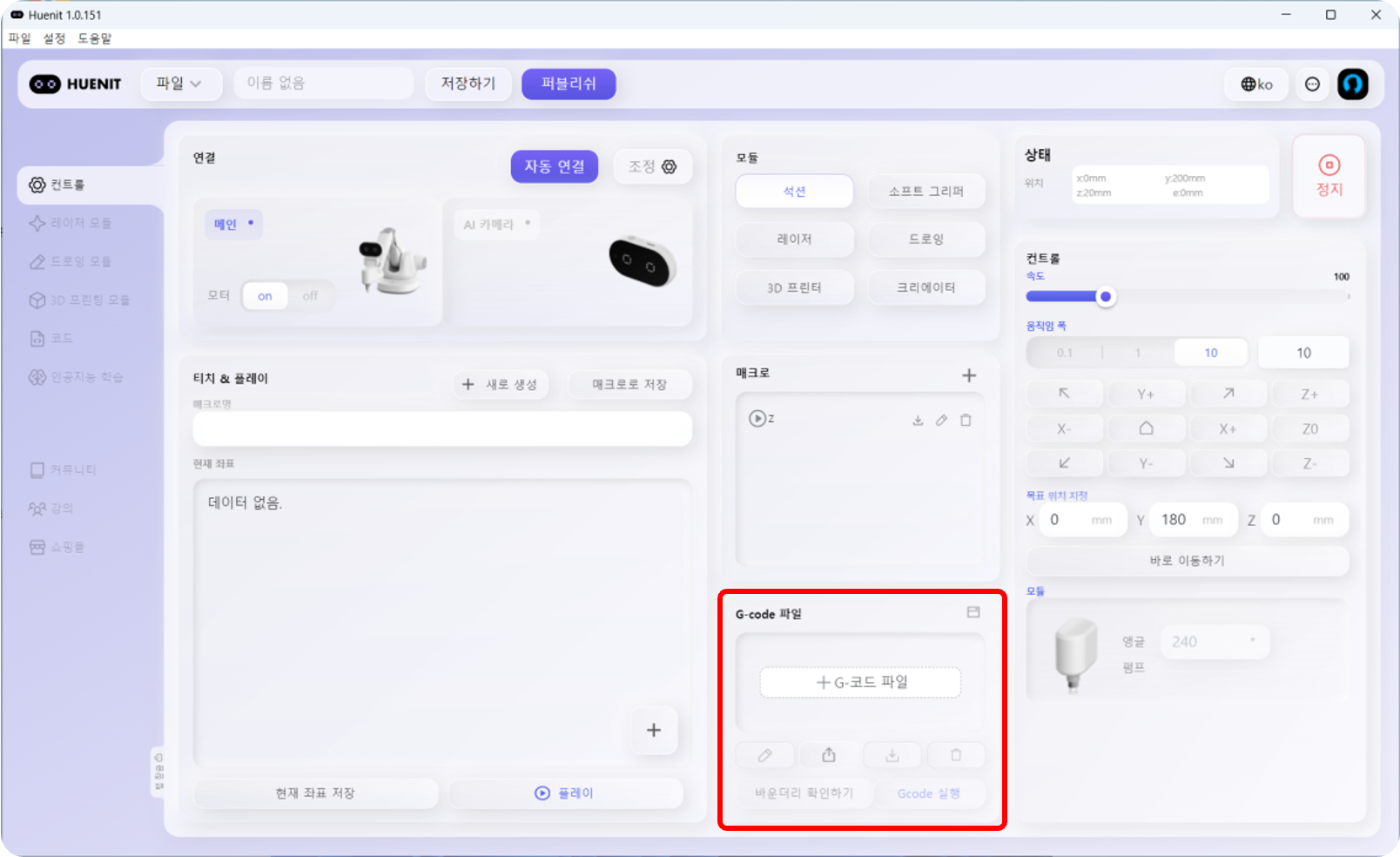
#### 4. G-code 파일 실행
**\[G-code 파일]**은 G-code를 업로드하여 로봇팔을 바로 실행할 수 있는 기능이다.